ANALOG-1 performed with great success
On Monday 25 November 2019, the ANALOG-1 experiment was performed with great success.
ANALOG-1 is the final step in ESA’s ongoing METERON (Multi-purpose End To End Robotics Operations Network) project, which is an initiative to develop and test robotics, communications and operations innovations that astronauts could use to explore the solar system. ANALOG-1 stands for a series of experiments where the International Space Station will be used as a stand-in for a spacecraft in orbit around another planetary body, such as the lunar Gateway. This same approach could be used in the future to explore, robot and human, “hand in hand”, planets such as Mars.
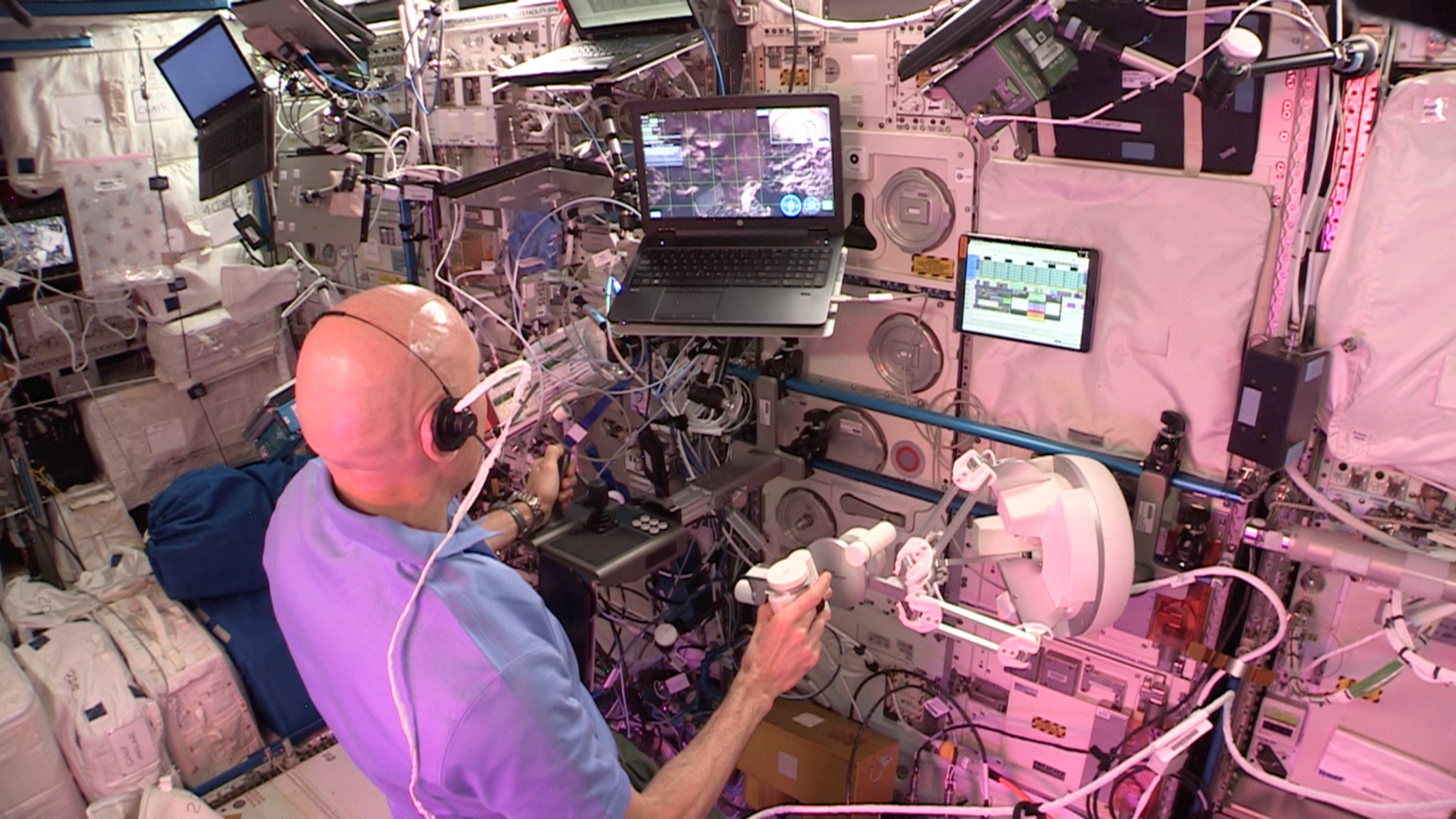
The final space to ground execution of the experiment took place yesterday where Astronaut Luca Parmitano performed geological sampling on earth, making use of the haptic control station in the ISS to control a mobile robot on ground.
Luca drove the robot through an obstacle course, visiting three sampling sites to collect geological samples. The control station, consisting of a joystick payload and force-feedback Sigma.7 device, made sure that the robot motion was directly coupled to that of the astronaut. Through force feedback, Luca was able to feel the interaction with the soil and samples. Ensuring good environmental awareness and effective robot control.
Besides the contributions from the partners in the ANALOG-1 project, also ATG Europe colleagues from our Telerobotics Service to ESA have been involved from the beginning of the project. This included; to find ideas and solutions, build the on-board hardware, build the rover, established a big part of the infrastructure, developed the ground and on-board software, designed the communication, and supported all parts of the operations.
The HRI-lab consists of ESA staff and contractors, working together closely on in-house research and development, collaborating with space industry and commercial partners.
We are particularly proud of our ATG colleagues who were contributing to this great work.
- Frank van der Hulst (ATG Europe) – Mechatronics and System Integration
- Emiel Den Exter (ATG Europe) – Mechanics and User experience
- Edmundo Ferreira (ATG Europe) – Software, System Control, and Architecture
- Andrei Gherghescu (ATG Europe) – Software, Control, and Communication
The experiment was part of the ongoing endeavor to prepare teleoperation technology for applications in space. This allows operators in a safe environment (e.g. on earth, in an orbiter, or in a pressurized rover) to control robots in space or on a planetary surface. While robots deal best with structured environments and repeated tasks, humans are invaluable for their problem solving capacities and flexibility in unexpected situations. Teleoperation technologies allow to leverage the strengths of the human operator and robot both.
Thank you very much for the great work from the Robotics team and we are happy and honoured to have colleagues working on such a great endeavour.
Photo/Video credit: ESA